Table of Links
2. Preliminaries and 2.1. Blind deconvolution
2.2. Quadratic neural networks
3.1. Time domain quadratic convolutional filter
3.2. Superiority of cyclic features extraction by QCNN
3.3. Frequency domain linear filter with envelope spectrum objective function
3.4. Integral optimization with uncertainty-aware weighing scheme
4. Computational experiments
4.1. Experimental configurations
4.3. Case study 2: JNU dataset
4.4. Case study 3: HIT dataset
5. Computational experiments
5.2. Classification results on various noise conditions
5.3. Employing ClassBD to deep learning classifiers
5.4. Employing ClassBD to machine learning classifiers
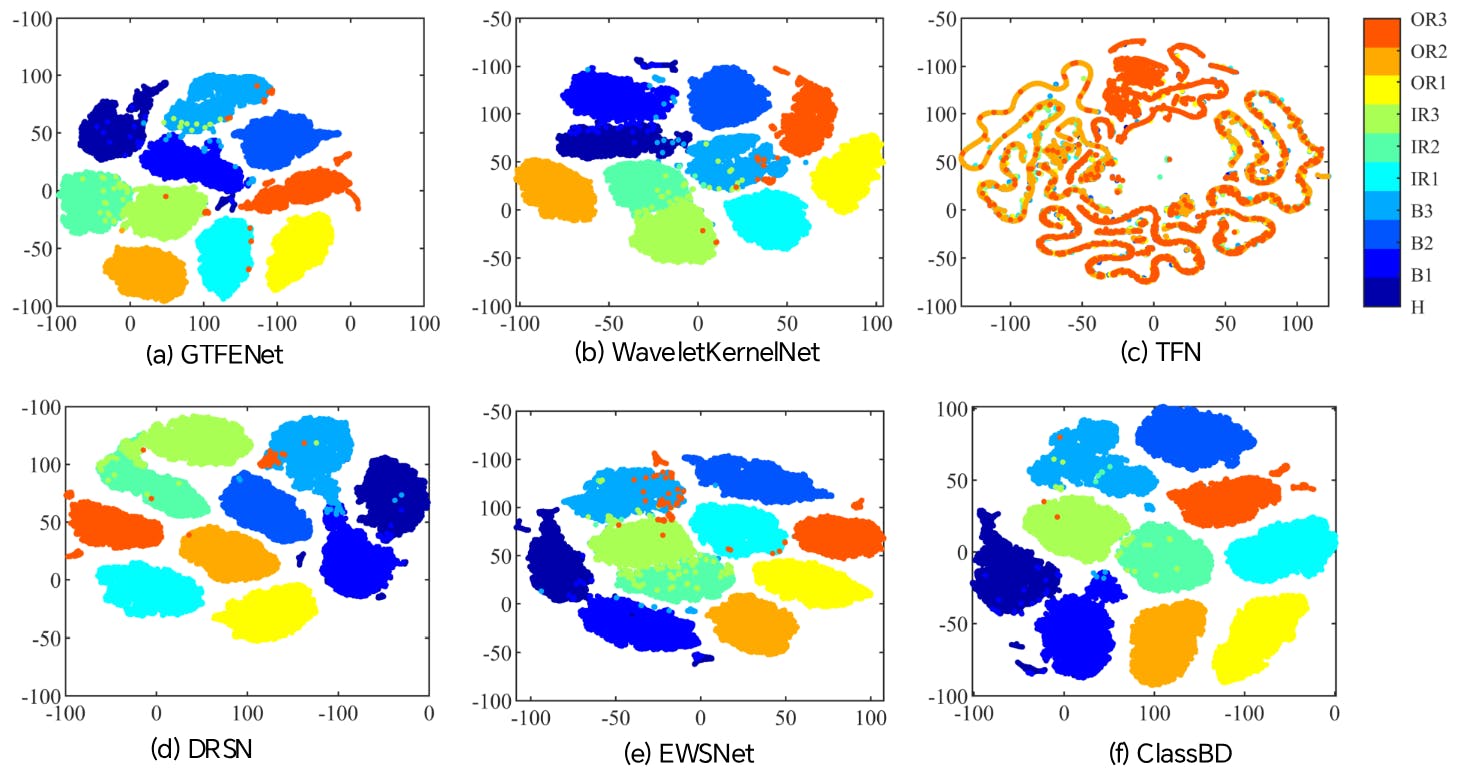
5.5. Feature extraction ability of quadratic and conventional networks
5.6. Comparison of ClassBD filters
5.2. Classification results on various noise conditions
To underscore the superior performance of ClassBD in handling various types of noise, we conduct a comparative analysis using several synthetic and real-world noises.
First, we generate Gaussian and Laplace noises from their respective probability density functions:

where 𝜇 and 𝜎 denote mean and standard deviation respectively, and are set 𝜇 = 0, 𝜎 = 1 for Gaussian noise. For Laplace noise, 𝛾 represents the location parameter and 𝑏 is the scale parameter, with 𝛾 = 0, 𝑏 = 1.
Furthermore, pink noise is generated in the frequency domain, with its power spectral density inversely proportional to the signal frequency:

where 𝑓 denotes the randomly determined frequency of the noise, and 𝛼 is set to 1. In this experiment, we validate the classification performance on the PU "N09M07F10" dataset and set the SNR to -4dB for all synthetic noises.
Lastly, we employ two types of real-world noises, collected from an airplane and a truck using acoustic sensors, to simulate bearings operating under real-world conditions [2]. Due to the discrepancy between the signal power captured by the acoustic and vibration sensors, we adjust the noise power to match the power of the vibration signal, thereby simulating a real-world bearing failure scenario.
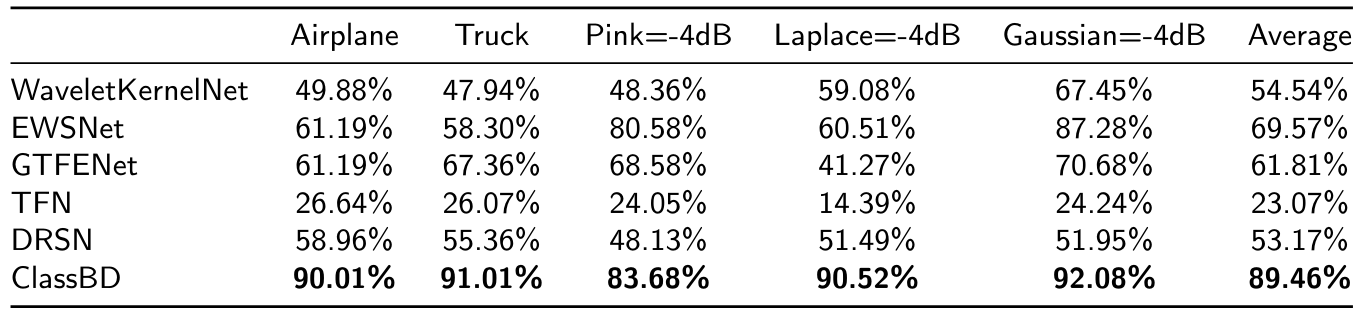
The experimental results, presented in Table 10, reveal that our method delivers the highest average F1 score, outperforming the second-best method by 20%. This underscores the superior anti-noise performance of ClassBD across different types of noise. Specifically, Gaussian noise is the easiest to handle, with several methods (WaveletKernelNet, EWSNet, GTFENet, ClassBD) achieving optimal results at the same SNR. Conversely, pink noise appears to be the most challenging, as evidenced by the highest-performing method only achieving an 83% F1 score. This is likely due to pink noise being generated in the frequency domain, which can interfere with the signal frequency. Finally, when considering the two real-world noises, ClassBD significantly outperforms other methods, demonstrating approximately 40% improvement over the second-best method. A comparison of the performance of several methods reveals that the difficulty of handling real-world noise lies somewhere between Gaussian and Laplace noise, indicating the efficacy of using synthetic noise to simulate real-world scenarios.
Authors:
(1) Jing-Xiao Liao, Department of Industrial and Systems Engineering, The Hong Kong Polytechnic University, Hong Kong, Special Administrative Region of China and School of Instrumentation Science and Engineering, Harbin Institute of Technology, Harbin, China;
(2) Chao He, School of Mechanical, Electronic and Control Engineering, Beijing Jiaotong University, Beijing, China;
(3) Jipu Li, Department of Industrial and Systems Engineering, The Hong Kong Polytechnic University, Hong Kong, Special Administrative Region of China;
(4) Jinwei Sun, School of Instrumentation Science and Engineering, Harbin Institute of Technology, Harbin, China;
(5) Shiping Zhang (Corresponding author), School of Instrumentation Science and Engineering, Harbin Institute of Technology, Harbin, China;
(6) Xiaoge Zhang (Corresponding author), Department of Industrial and Systems Engineering, The Hong Kong Polytechnic University, Hong Kong, Special Administrative Region of China.
This paper is available on arxiv under CC by 4.0 Deed (Attribution 4.0 International) license.
[2] https://github.com/markostam/active-noise-cancellation