
Table of Links
2. Preliminaries and 2.1. Blind deconvolution
2.2. Quadratic neural networks
3.1. Time domain quadratic convolutional filter
3.2. Superiority of cyclic features extraction by QCNN
3.3. Frequency domain linear filter with envelope spectrum objective function
3.4. Integral optimization with uncertainty-aware weighing scheme
4. Computational experiments
4.1. Experimental configurations
4.3. Case study 2: JNU dataset
4.4. Case study 3: HIT dataset
5. Computational experiments
5.2. Classification results on various noise conditions
5.3. Employing ClassBD to deep learning classifiers
5.4. Employing ClassBD to machine learning classifiers
5.5. Feature extraction ability of quadratic and conventional networks
5.6. Comparison of ClassBD filters
3.2. Superiority of cyclic features extraction by QCNN
In this section, we provide a theoretical derivation to address the following question: Why are quadratic convolutional networks beneficial for the extraction of features from periodic and non-stationary signals?

As shown in Eq. (11), a quadratic network employs a convolution kernel of size 𝐾 to convolve over a segment of 𝒙. The quadratic function has two parts: the product of two inner-product terms and one power term. The inner-products terms can be further factorized as follows:
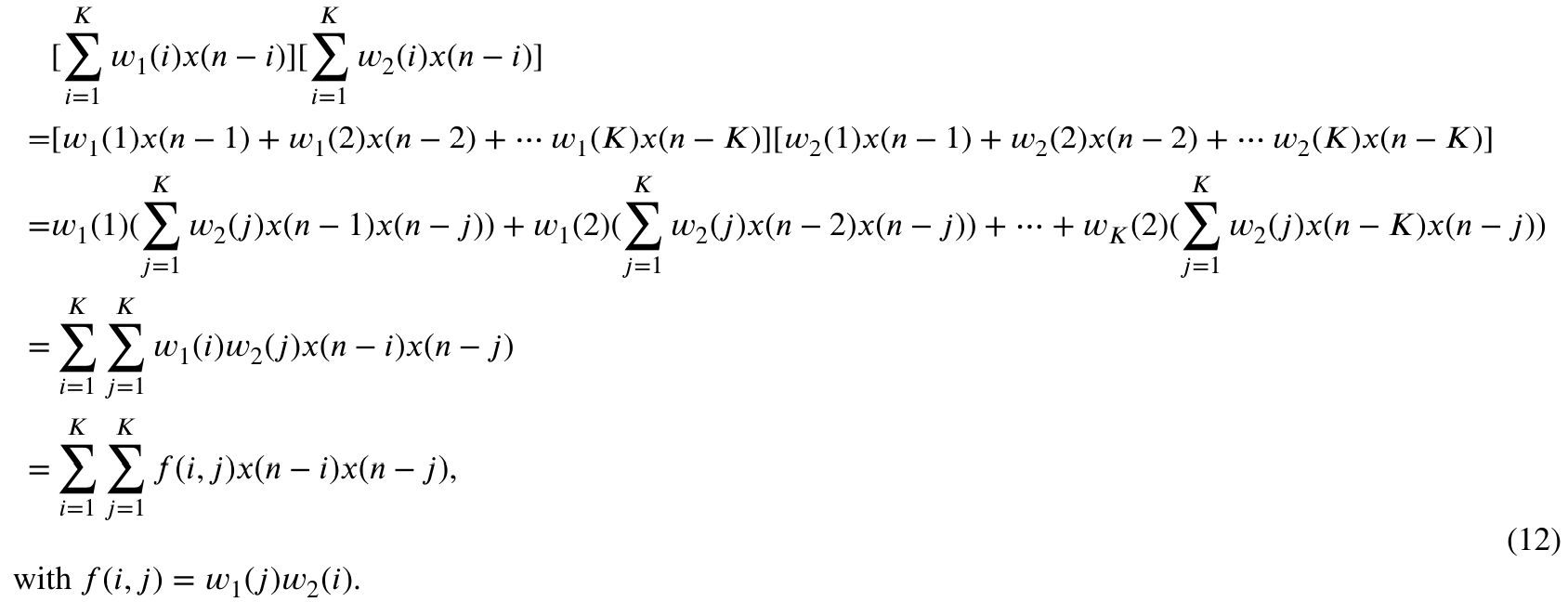
Eq. (12) demonstrates that the inner-product terms signifies several convolution operations: cross-correlation between filters and inputs, and autocorrelation for input signals. These operations are crucial for cancelling noise in the bearing fault vibration signals.
Next, we establish the relations between QCNN and bearing fault signals. The ideal bearing fault mathematical model is given as follows [18, 60]:

where 𝑝(𝑡) is an impulse response by signal impact, 𝑞(𝑡) = 𝑞(𝑡 + 𝑇) is the periodic modulation with a period of 𝑇, 𝑇 denotes the interval time between two consecutive impacts on the fault, and 𝑛(𝑡) denotes the additive Gaussian noise.
The instantaneous autocorrelation function is defined as follows [61, 62]:

where 𝜏 is the time delay.
Generally, the bearing fault signal can be regarded as a second-order cyclostationary signal [60]. In other words, this signal presents periodicity in its second-order statistics (autocorrelation function). For Eq. (13), we have:

Under this assumption, since the noise is randomized over the full time period and it has no periodicity, its autocorrelation function is expressed as:

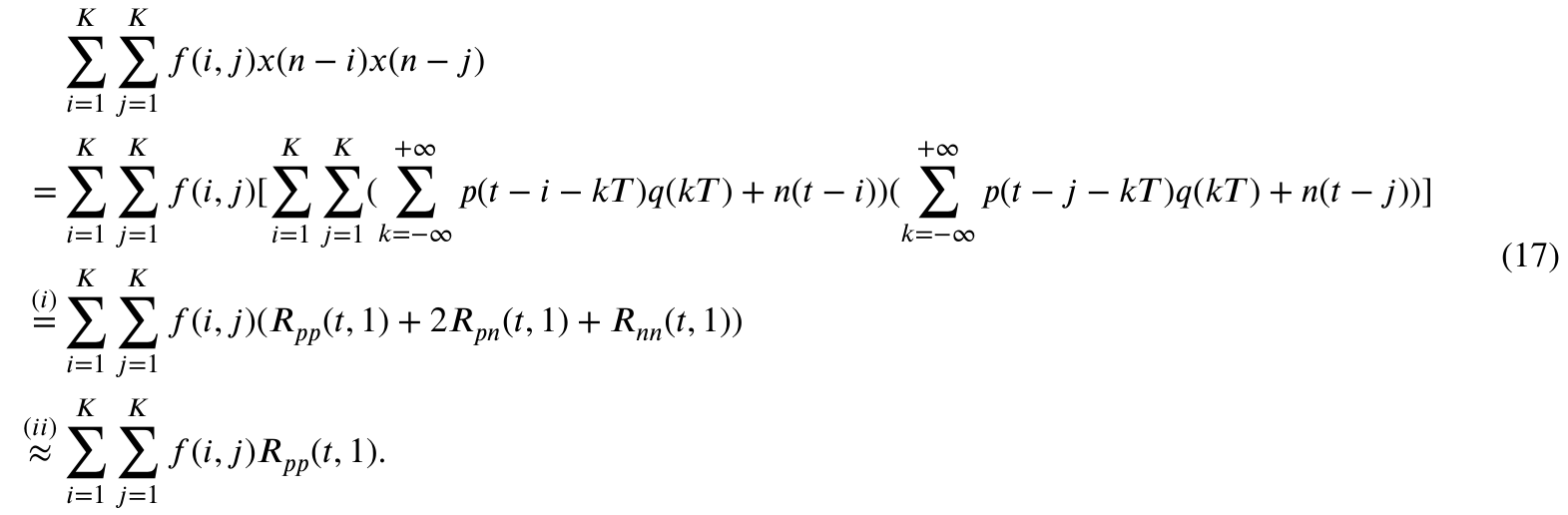
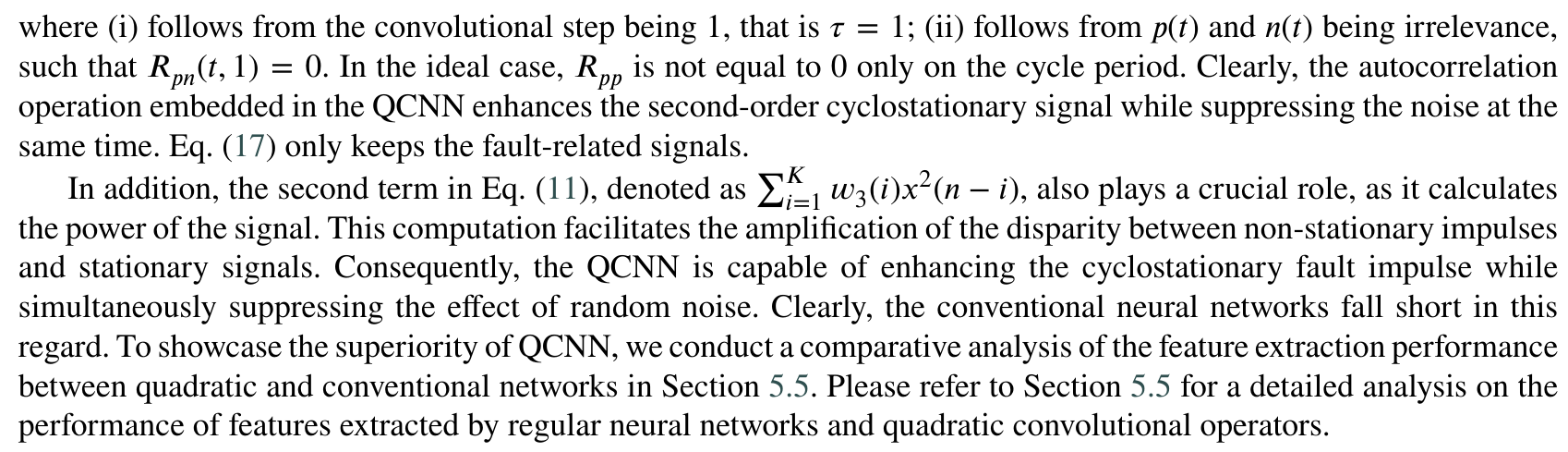
Lastly, let us show how the quadratic neuron enhances the fault-related signal from the noise. Combining Eqs. (12) and (13), we have:
Authors:
(1) Jing-Xiao Liao, Department of Industrial and Systems Engineering, The Hong Kong Polytechnic University, Hong Kong, Special Administrative Region of China and School of Instrumentation Science and Engineering, Harbin Institute of Technology, Harbin, China;
(2) Chao He, School of Mechanical, Electronic and Control Engineering, Beijing Jiaotong University, Beijing, China;
(3) Jipu Li, Department of Industrial and Systems Engineering, The Hong Kong Polytechnic University, Hong Kong, Special Administrative Region of China;
(4) Jinwei Sun, School of Instrumentation Science and Engineering, Harbin Institute of Technology, Harbin, China;
(5) Shiping Zhang (Corresponding author), School of Instrumentation Science and Engineering, Harbin Institute of Technology, Harbin, China;
(6) Xiaoge Zhang (Corresponding author), Department of Industrial and Systems Engineering, The Hong Kong Polytechnic University, Hong Kong, Special Administrative Region of China.
This paper is available on arxiv under CC by 4.0 Deed (Attribution 4.0 International) license.